A milestone day: The first controlled rotations for the HAPP test apparatus! (clap, clap, clap)
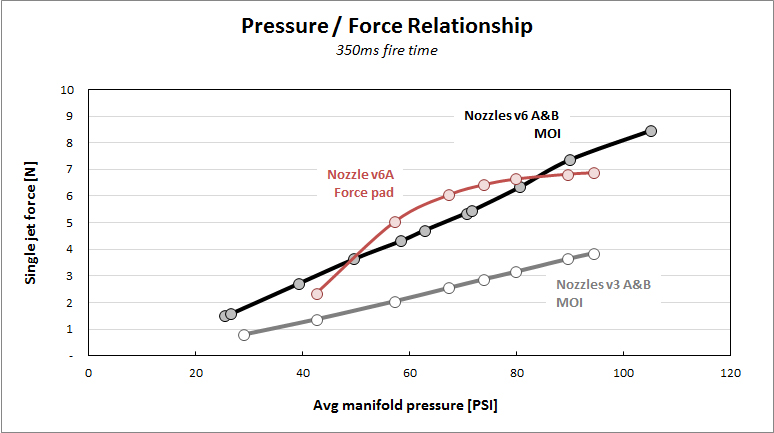
At this point all the fundamental building blocks have come together. We have some 3D-printed jet nozzles attached to a pneumatic valve system that's controlled by an on-bard IMU. We developed a method to measure the moment of inertia quite accurately, and then we used the MOI to back-calculate the actual jet force. Furthermore, we were able to describe jet force as a mathematical function of manifold pressure, which we can measure in real time to account for regulator droop or other issues (such as multiple jets firing at once).
The HAPP apparatus at this point doesn't look much like the flight hardware we'll actually use in the future. Right now the apparatus is a jumble of plywood, cardboard, hot glue, tie straps, and a mess of wires and tubes. It only has arms and jets for a single axis (yaw). The only parts that are potential flight hardware are the Arduino controller and IMU, the carbon fiber jet arms and the 90 cubic inch carbon fiber compressed gas tank rated to 4600 PSI (normally used for paint ball!). However, it's all running on independent battery power and gas pressure - no connections to the outside world. Here's the test rig in all its sloppy glory:
I don't even have 4 nozzles of the same design to use as the plus and minus jets on the yaw axis. All I've got are two each of designs v3 and v6. That's OK - the controller doesn't care as long as it knows the pressure / force curve for each one. Despite all this, I simply couldn't wait to hook everything up and watch the system control its own rotations.
So, without further delay, here's a video of the very first controlled rotations. It starts with me spinning the rig by hand. After a 6 second delay, the controller (a.k.a the autopilot) nulls out the rotation and simply sits on the current heading. It doesn't try to return the rig to a pre-set heading - I'm just keeping it simple for the first tests until I can tune the controller more finely. After the jets stop the rotation, I bump the rig in both directions, and you can see the jets null out the induced motion. Finally, I give it a good spin, and the system stops itself in a matter of seconds.
There are many months of hard work ahead on this project, but as of today I can say one thing - this is going to work! Enjoy the video and leave me some comments :-)
At this point all the fundamental building blocks have come together. We have some 3D-printed jet nozzles attached to a pneumatic valve system that's controlled by an on-bard IMU. We developed a method to measure the moment of inertia quite accurately, and then we used the MOI to back-calculate the actual jet force. Furthermore, we were able to describe jet force as a mathematical function of manifold pressure, which we can measure in real time to account for regulator droop or other issues (such as multiple jets firing at once).
The HAPP apparatus at this point doesn't look much like the flight hardware we'll actually use in the future. Right now the apparatus is a jumble of plywood, cardboard, hot glue, tie straps, and a mess of wires and tubes. It only has arms and jets for a single axis (yaw). The only parts that are potential flight hardware are the Arduino controller and IMU, the carbon fiber jet arms and the 90 cubic inch carbon fiber compressed gas tank rated to 4600 PSI (normally used for paint ball!). However, it's all running on independent battery power and gas pressure - no connections to the outside world. Here's the test rig in all its sloppy glory:
 |
| Ugly but functional! |
I don't even have 4 nozzles of the same design to use as the plus and minus jets on the yaw axis. All I've got are two each of designs v3 and v6. That's OK - the controller doesn't care as long as it knows the pressure / force curve for each one. Despite all this, I simply couldn't wait to hook everything up and watch the system control its own rotations.
So, without further delay, here's a video of the very first controlled rotations. It starts with me spinning the rig by hand. After a 6 second delay, the controller (a.k.a the autopilot) nulls out the rotation and simply sits on the current heading. It doesn't try to return the rig to a pre-set heading - I'm just keeping it simple for the first tests until I can tune the controller more finely. After the jets stop the rotation, I bump the rig in both directions, and you can see the jets null out the induced motion. Finally, I give it a good spin, and the system stops itself in a matter of seconds.
There are many months of hard work ahead on this project, but as of today I can say one thing - this is going to work! Enjoy the video and leave me some comments :-)